I’m really new to Helicopter auto level system. I’m used to with normal flight controller like BeastX and Mikado V-Bar.
For setup DJI Naza-H and GPS. The assistant software come with a good on screen explanation. You can follow step by step.
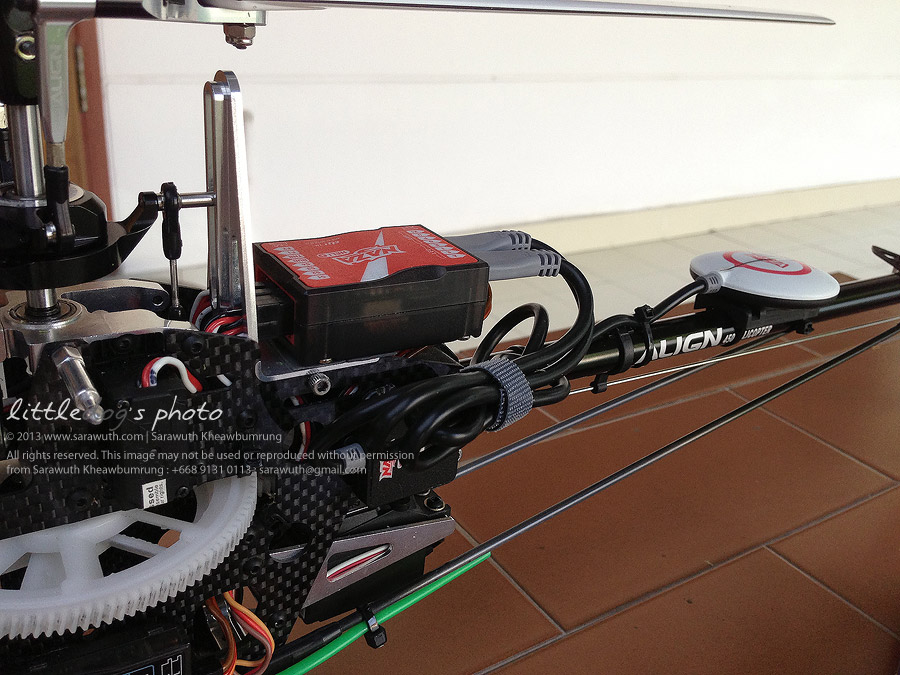
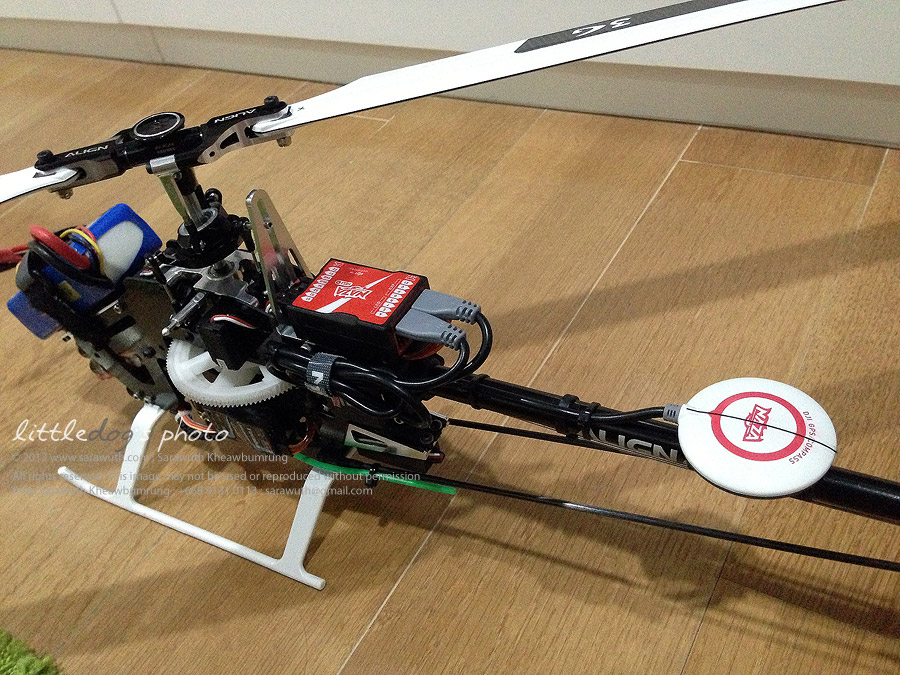
After setup, you’ll get three flying mode. Manual, Attitude Hold, GPS+Attitude Hold. And i’m put this DJI Naza-H on Trex450 DFC.
The basic gain on Trex450 is not good. On manual mode you have to increase to 110% both. And I’m also increase Attitude gain to 110%. Also decrease cyclic degree response from 180 degree to 140 degree.
Ok, when you ready to fly. Please always start with manual mode. It quite good compare with other flight controller. But still need to adjust some gain.
Second flying mode. Attitude hold is wired. As new firmware change log said, when you switch to Attitude mode on the ground. Swashplate will tilt to right (CW rotor). But when fly the swashplate must level to ground. I already test this mode many times. And problem still occur.
Please aware this mode!!
Third flying mode. GPS/Attitude hold is correct. Helicopter position is great and hold attitude normally.





GPS Hold mode. I decided to skip attitude hold mode and just switch from manual to GPS hold. It make me feel good. My helicopter hold position perfect. Attitude hold is great!

