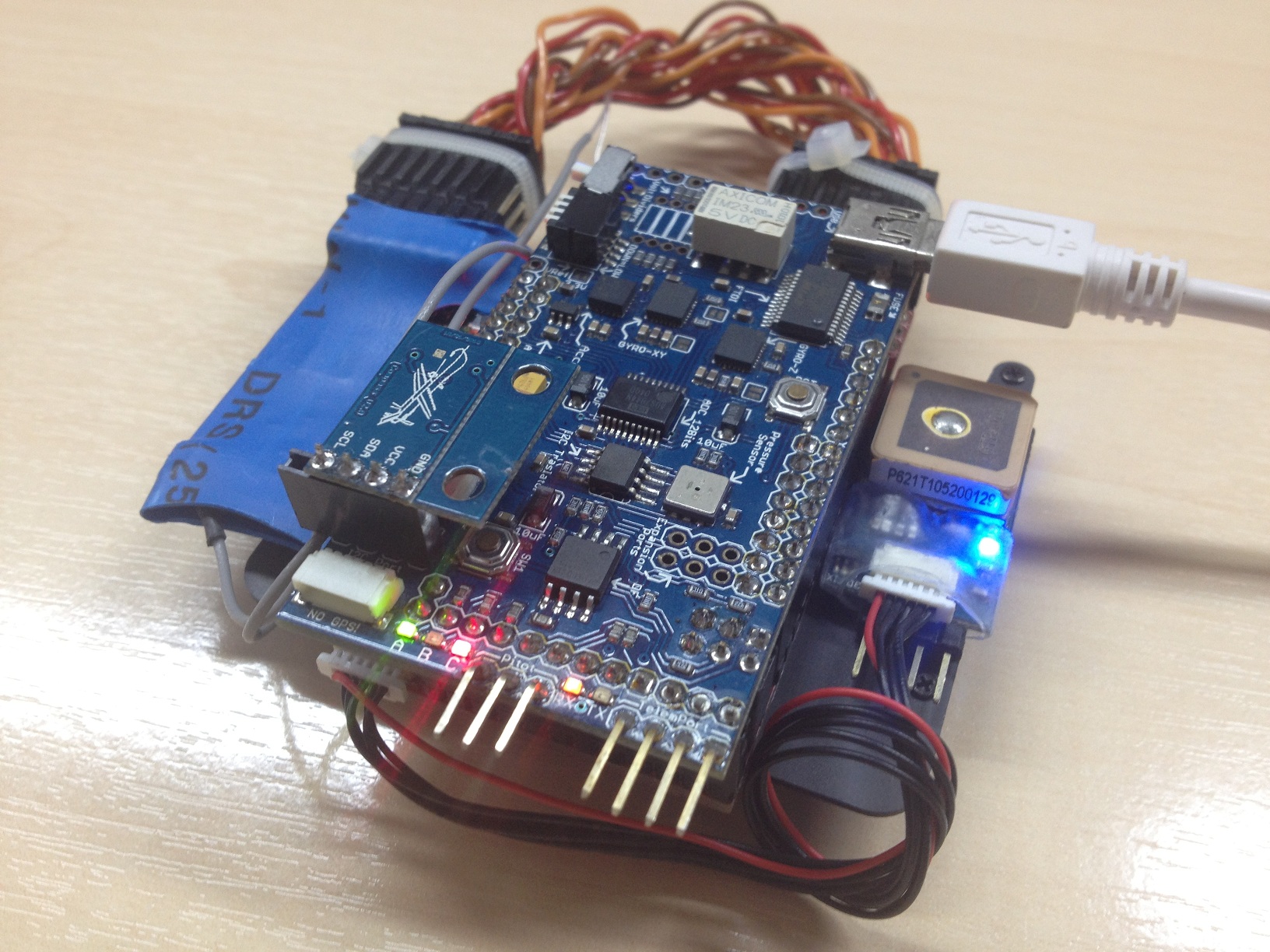
Altitude Hold mode Arducopter 2.2b4 with Gaui 500X
Equipment: – Ardupilot APM1.0 (1280) + Oilpan – MB 1240 XL-EZ4 Sonar from Maxbotix – Frame Gaui 500X with 330X-S Motor/Speed Result: After adjust some ALT_HOLD_P and THR_P gain. Overall Altitude hold was good. Because of beam behavior on EZ4. It may cause altitude change immediately a bit. And some test on barometer hold was…